|
|
Our outdoor robots
Three helicopters H-3



|
| model |
Aero-Tec CB-5000 |
| rotor diameter |
1,8
m |
| total
mass
|
12-16
kg |
hardware
for autonomous operation |
PC-104
embedded computer
Novatel differential GPS
GX1 Microstrain IMU
Wireless lan for air to ground communication
custom made rpm sensor for the main rotor
serial interface to the remote control receiver |
| engine |
two-stroke
23 ccm gasoline-oil-mix |
|
Plane H-P1


|
| model |
"Bully" from Vogt-Flugmodelle |
| wingspan |
2,5
m |
| total
mass
|
11-16
kg |
hardware
for autonomous operation |
PC-104
embedded computer
Novatel differential GPS
GX1 Microstrain IMU
Wireless lan for air to ground communication
custom made rpm sensor for the engine
serial interface to the remote control receiver |
| engine |
two-stroke
58 ccm gasoline-oil-mix |
|
Quad-rotor H-Q1 (under construction)
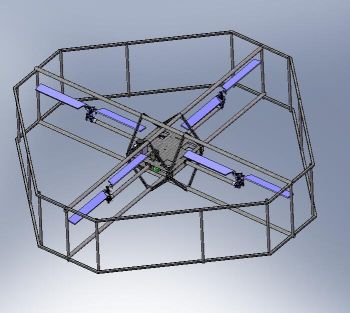 |
| model |
prototype |
| edge length |
2
m |
| total
mass
|
15-20
kg |
| engine |
two-stroke
gasoline-oil-mix |
|
Our
indoor robots
Logo 14
 |
| model |
Mikado Logo14
Carbon in a selfmade security cage |
| rotor
diameter |
1,3
m |
| total
mass
|
5
kg |
| engine |
brushless
DC electric motor |
|
Quadrotor
 |
| model |
selfmade |
| edge
length |
0,8
m |
| total
mass
|
5
kg |
| engine |
four
brushless DC electric motors with fixed pitch airscrews |
|
|
|
|