Basic Idea: The aim of the TUPLEE project is to build an exoskeleton robot (orthosis) that can be used for rehabilitational purposes. It should support the subject's muscles in the lower extremities with additional forces by electrical actuators. It should not only aid in specific rehabilitational motions but also in every-day movements e.g. like walking, getting up from a chair, sitting down and climbing stairs. The orthosis is mainly designed for indoor environments where power supply by wire is possible.
All details about the control scheme and results from experiments can be found in the published papers. Most of them can be downloaded here.
There is also a short video (70MB) for download available here. It shows the sit-to-stand movement, walking, and stair-climbing with actuator support. Some scenes are repeated in slow-motion, so that the output of the visualization can be easily followed.
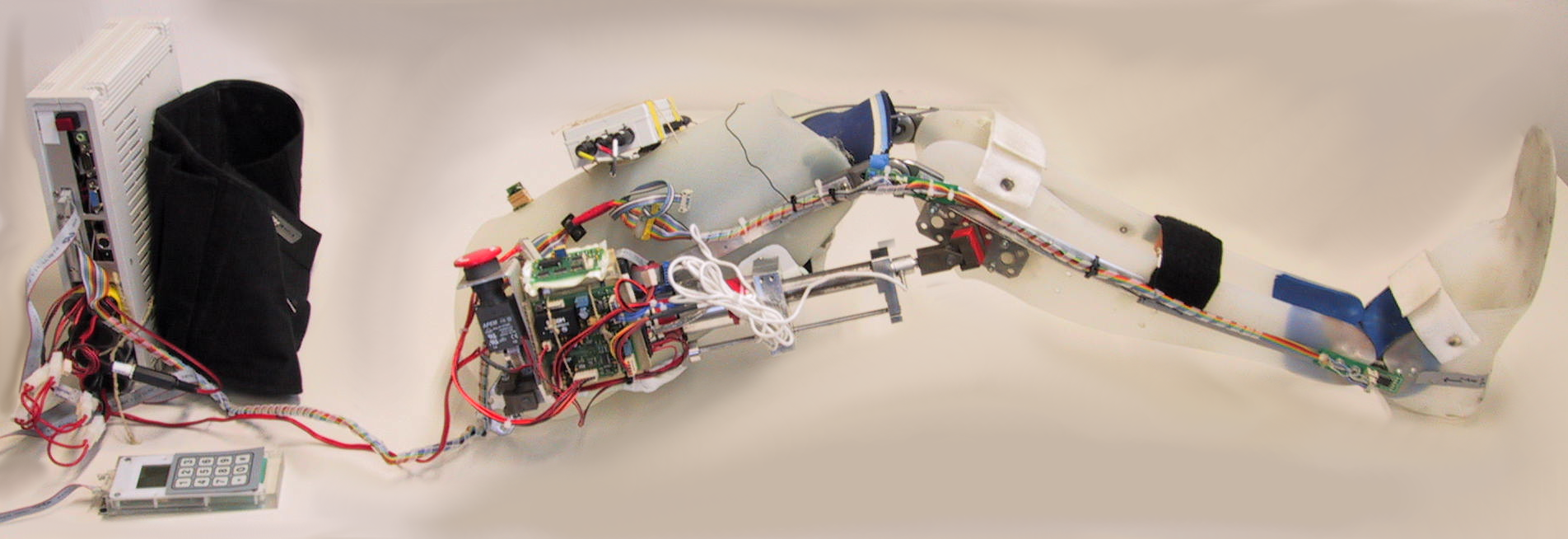
Latest version of the exoskeleton with single board computer and power supply from March 2007.
 |
 |
 |
 |
 |
