Department of Computer Science |
 |
Institute
for Technical Computer Science |
Powered Hand Exoskeleton
Department of Computer Science |
|
Institute
for Technical Computer Science |
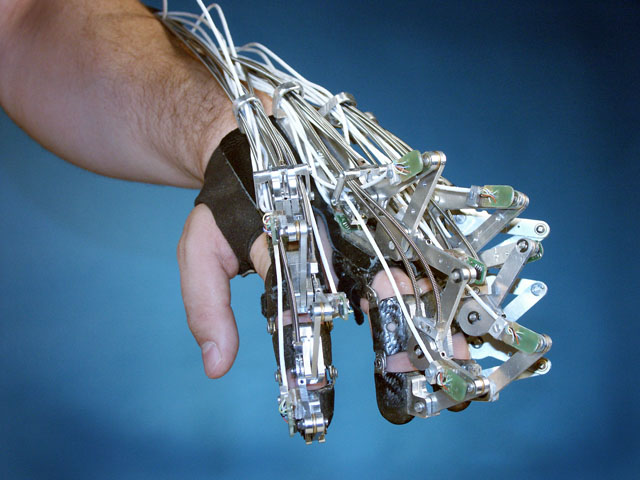
FeaturesThe powered hand exoskeleton is an orthotic device that is worn by a human. Individual joints of the human hand can be moved. The actuation is performed by electric motors which transmit forces to the joints through Bowden cables. A real-time controller calculates the necessary control signals for the motor controllers based on the measured forces and joint angles. A separate interface computer allows the therapist to change the control modes, define new exercises, and supervise the rehabilitation. Following features are integrated to support movement and diagnosis:
Other Possible ApplicationsThe device was developed with the focus on the rehabilitation of hand injuries. Other possible application of hand exoskeleton devices are:
Control ModesFor the support of rehabilitation a position control based on sliding mode control was implemented. Force based control is also supported by using force sensor data to generate a trajectory for the position control loop. Force control can be used to simulate a minimal friction of the environment. The hand exoskeleton then basically follows the human movements. By increasing simulated friction the human must use more force to move the hand exoskeleton which is useful to strengthen the muscles. By mixing of position and force control guided movements with human interaction become possible. The hand exoskeleton therefore allows to support rehabilitation by following exercises:
|