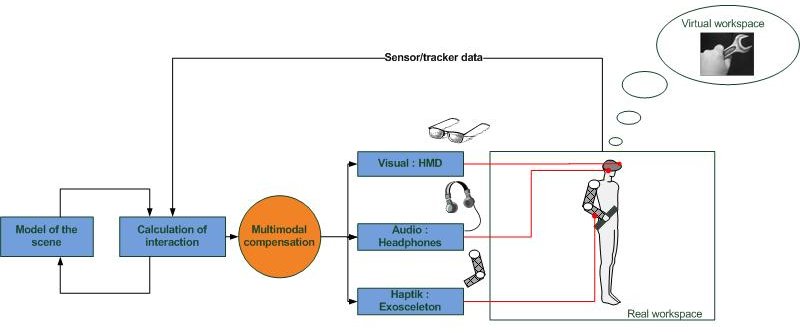
| Figure 1: Diagram of the multimodal virtual reality system |
The ongoing work in our laboratory for multimodal human-computer interaction
is focused on the development of a system for virtual reality with
haptic feedback based on light weight arm exoskeletons. The key features
of this system are a high degree of immersion into the computer generated
virtual environment and a large working volume. The high degree of
immersion will be achieved by multimodal human-exoskeleton interaction
based on haptic effects, audio and three dimensional visualization.
The large working volume will be achieved by a lightweight wearable
construction which can be carried on the back of the user. |
| In order to achieve this, a system is being developed which consists of the following three main modules: |
|
| Figure 1: Diagram of the multimodal virtual reality system |
The position and orientation of the user in the real workspace is going to be tracked by a state of the art motion tracking system. This will allow access to a larger workspace in the virtual environment which is one of the most important properties common multimodal virtual reality systems nowadays still lack. In addition to this the orientation of the users head will be tracked by a 3DOF tracking device so that the users movements of the head will be translated to rotation of the viewports orientation displayed by the graphics server. |
The software design will follow a modular approach so that the different domains of the multimodal system can interact even though they run with different update rates. This is necessary because of the fact that the human's sense of touch interpretes forces only in a natural way if these are being presented by the system with an update rate of at least 1000Hz whereas the visual render module only requires an update rate of approx. 60Hz for a smooth 3D visual experience. |
| The inherent mechanical properties of the haptic feedback arm in conjunction with the key features of a virtual reality system with haptic feedback lead to the following three main research topics which will be covered in the project: |
|
Some of the other research projects that were going on in our group:
|
| Letzte
Änderung: 09.01.2009 Ingo Kossyk |
 Impressum |
|