Department of Computer Science |
 |
Institute
for Technical Computer Science |
Image Acquisition System
Department of Computer Science |
|
Institute
for Technical Computer Science |
 |
 |
Hardware Necessities for Image AcquisitionMarvin was always and is still using a digital still camera for image acquisition. Before the 2003 this has been a camera, which was capable of retrieving pictures with a resolution of 640 x 480 every 5 seconds or 1024 x 768 every 15 or every 20 seconds depending on the used quality settings. This camera was also connected to the microcontroller by RS232 and the picture data was routed through the usual communication system. The file size of the pictures has been 50-250 kBytes. In 2003 this camera was replaced by a state-of-the-art digital still camera that has a higher resolution and is featuring an optical zoom. Since these cameras are no longer connected by RS232 but USB it was necessary to get a USB host device on the helicopter. In addition, a picture size of up to 2272x1704 pixels with a filesize of up to 2.5 Mbytes imposed the need for a higher-speed radio communication link than the formerly used DECT (Digital European Cordless Telephone) modules double that had a combined bandwidth of 210 kbit/s. These both requirements made it necessary to put an additional CPU on board the helicopter, which can interface the new camera and is able to use wireless LAN as communication mean, because this is today the only affordable choice for higher bandwidth data communication. The camera is currently still the 2003's Canon S45 but can easily be replaced with current Canon consumer or DSLR models. This camera is of the 4 mega pixel class (max. 2272x1704 pixels per image) and has a 3 times optical zoom, therefore the reachable resolution is up to 12 times higher than with the old 0.8 mega pixel class camera. The camera features an USB connector and has a special drive mode that makes it possible to remote-control the camera via the USB connection nearly as well as manually at the camera itself including zoom setting, release time and aperture setting. The picture can be transferred to the connected USB host without having to be saved to a memory card in the camera, therefore no memory card is needed in this special drive mode. The benefit is a lower latency in picture acquiring and less power consumption when the images have to be transmissitted to the ground station. When using a kind of pipelining a picture of the shown quality and resolution can be fetched every 7-9 seconds from the camera including transmission time to the ground station. Alternatively the pictures can be stored in the camera which results in a picture every 1-2 seconds. Additionally, the S45 features a special mode called viewfinder. In this mode, the camera takes several pictures per second in a resolution of 320 by 240 pixels. The framerate depends on the image contents and is around 8 fps for real images. The resolution is similar to the usable single frame resolution of video cameras and can be used as video camera alternative.
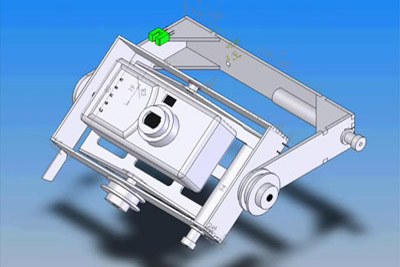
Pan-Tilt-PlatformTo give the camera the possibility to change its angle easily, it was mounted on a custom-built pan-tilt-platform (PTP) with the usual two degrees of freedom. The goal was do develop a very light but stable platform that can carry different kinds of components not only the Canon S45 camera. The results of a material evaluation showed that the first choice material for this kind of task is carbon fiber composite (CFC). A cost-effective design was chosen that could be cut out of CFC sheets by 2-D-CNC-Mill and glued afterwards. The complete CAD of the pan-tilt-platform (PTP) has been made using SolidWorks. The platform is moved by two weight-efficient DC motors (27 g, 3 Watt) from Maxon that are equipped with planetary reduction gear and digital-angle-encoders and connected to the axles by gear belts. The design is optimized for the S45 so that both rotation axes are going through the camera’s center of gravity and the camera can be hold with a minimum amount of power consumption (practically none). The DC motors are position controlled by the microcontroller. For initializing the position, photoelectric beams are used. The final installation of the PTP showed very low vibration and the real angular position accuracy is about 0.5°.
SoftwareNormally, a plan-tilt-platform is manually controlled by a human operator, but there are also uses in a fully autonomous system. The combination of pan-tilt and the helicopter movement are giving nearly free choice for photo shooting position and angles. Several modes for the use of the camera holder are possible:
A GUI at the ground station has been developed for a human operator. It allows easy manual control of the PTP and to trigger the automatic modes. It uses the viewfinder mode as it was meant and gives the possibility to adjust important shot parameters and trigger high-resolution images at different frame rates. Below are some aerial images taken by Marvin in Portugal during the annual COMETS experiments (click them for original image). Usually the camera was set to full automatic mode. For the sincerely interested, the original images are including full EXIF data.
|
Next Previous - Top - Home





