Department of Computer Science |
 |
Institute
for Technical Computer Science |
MARVIN MarkII Helicopter
Department of Computer Science |
|
Institute
for Technical Computer Science |
The above picture was taken during a very early flight using some water as ballast.
The HelicopterThe Marvin mark II airframe is a commercially available helicopter made in Germany by Aero-Tec. The Mark II is based on their CB-5000 model which you will not find on the company's homepage by purpose (which only they know). It is based on the "Comeback" mechanics and "Novo-Tec" rotorhead of the CB-5000 as designed by Dieter Schlüter. 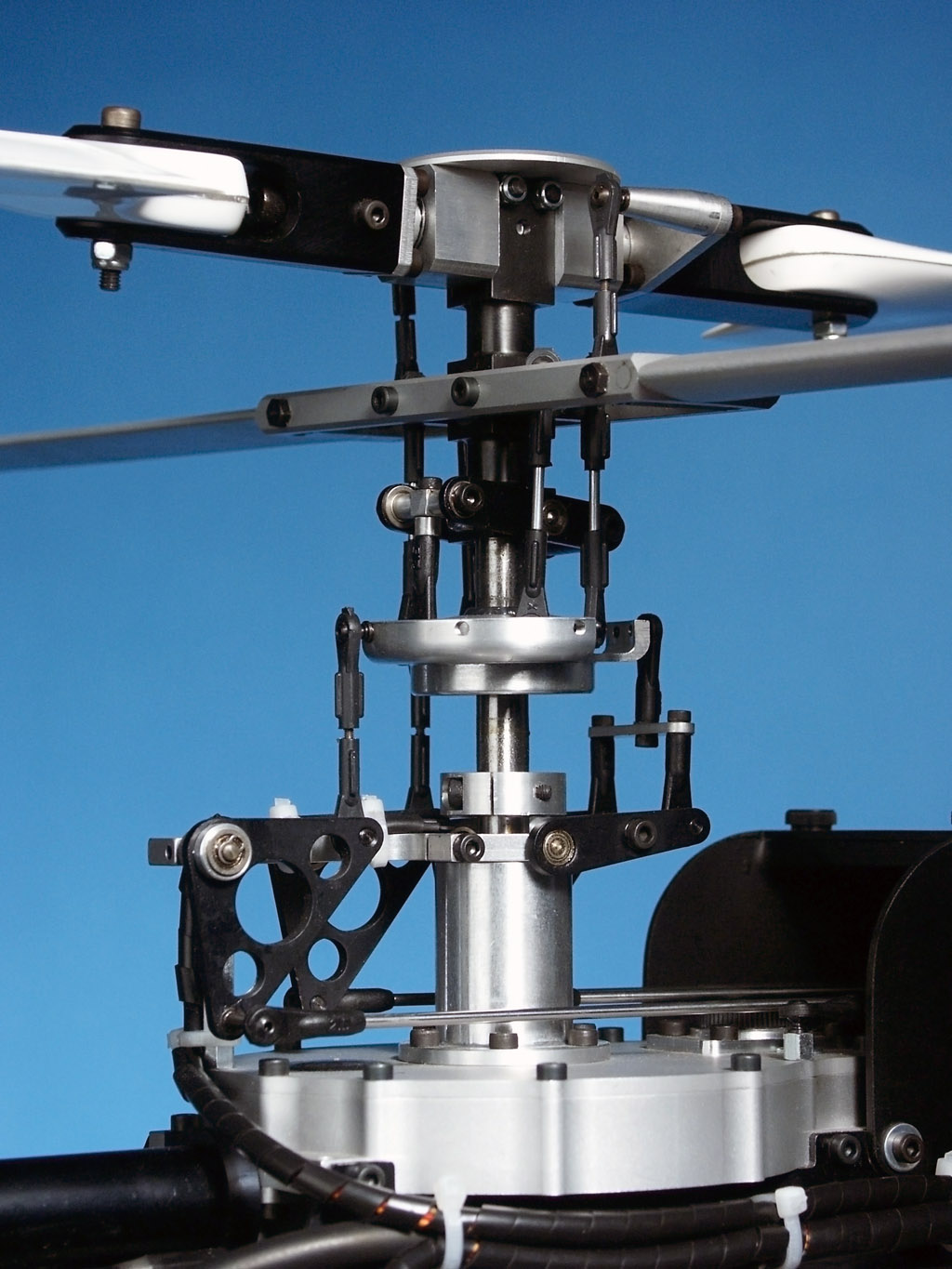 Comeback mechanics and Novo-Tec rotorhead Its main feature is the sealed, full metal, single-stage main rotor gear which is mounted directly to the engine building a self-supporting unit. Additionally there are some goodies that come in handy when one plans to build an autonomous helicopter. The setup bought by the TU is equipped with a sensor on the main rotor axis to be able to measure the real rotor's rpm, a high-stand landing gear with mounting capabilities and an electrical starter. The remote control equipment and gyro uses standard parts from Graupner. The engine is a Zenoah G230RC two-stroke 23 ccm gasoline-oil-mix engine with a maximum power output of 1.84 kW at 12500 rpm (more technical data here).  Comeback mechanics and engine below The helicopter has a two-blade main rotor with a diameter of 1.84 m and a two-blade tail rotor with a diameter of 0.34 m. The tail rotor is coupled to the main rotor via a gear with a fixed ratio. The rotations per minute of the main rotor are merely fixed during flights and about 1300 rpm. Changes in the lift, which are needed to move the helicopter, are only produced by changing the pitch of the main rotor blades. Changes are done symmetrically (collective pitch) for up and down movements and asymmetrically (cyclic pitch) for any other direction. To change the pitch of the main rotor a so-called swashplate is used. The swashplate is moved by three servos. Another servo is changing the pitch of the tail rotor and the fifth and last one acts as throttle. The swashplate and at least the throttle servo can be seen in the images above (click pic to magnify). The three servos for the swashplate are inside the black front box of the helicopter, but their linkage is visible. The tail rotor is used to compensate the main rotor's and engine's torque and change the heading of the helicopter. How to remote-control a model helicopterThe servos are controlled by pulse width modulated signals (PWM) where the pulse width is proportional to the position the anchor of the servo takes. In normal radio controlled flight done by a human pilot the servos are driven by the remote control receiver that receives these 5 signals from the remote control. The human pilot does not control directly the servos but uses a higher-level approach. The pilot has two 2-way sticks, one is controlling the cyclic pitch, which has 2 degrees of freedom and the other one is controlling the collective and the tail rotor pitch. The throttle is usually fixed by the pilot to a certain amount before take off. The remote control derives the single servo signals from the pilot's commands. The remote control also compensates for some couplings, for example, it raises throttle when the collective pitch is raised. In case of the CB-5000 the level of abstraction is very low because there is a dedicated collectiv pitch servo that moves the other two (cyclic pitch) servos. Practically always, a model helicopter pilot is using a gyroscope to help him regulating the tail rotor pitch to prevent rotation around the rotor axis caused by the changes of the main rotor's torque, which are coming from changes of rotor's rpm and pitch. All of the above-mentioned automatisms have to be adjusted for each particular set of helicopter model, servos, rotor blades, fuel, weather and so on. The remote control is one way, so there is nothing but visual feedback from the flying helicopter. The next section gives an idea how such a helicopter becomes autonomous. The pure technical specifications of the ready-to-fly MarkII are available here. |
Next Previous - Top - Home
Contact persons: Dipl.-Ing. Volker Remuß (E-Mail) or Dipl.-Inform. Uwe Wolfgang Brandenburg
